| 入門 | A級 | B級 |
a.基礎知識 b.技能証 |
a.機体を持つ b.初めてのテイクオフ c.テイクオフ d.直線飛行 e.ベースバーでの操作 f.着地の準備 |
a.始めての旋回 b.始めての90°旋回 c.180°以上の旋回 d.セーフティランディング e.着地点の判断 |
| C級 | P証 | クロカン |
a.最良滑空比 |
a.サイドアプローチ |
a.ポーラカーブ式の活用 b.着地点の風向判断 c.連続性 |
a.基礎知識
用語/雑学集
戻る
b.技能証
(社)日本ハンググライディング連盟が発行する
技能証で
ハンググライダー飛行技術レベルを証明します。
パイロット技能証取得で一人前です。
A級練習生技能証
B級練習生技能証
C級練習生技能証
パイロット技能証
クロスカントリー技能証
戻る
a.機体を持つ
20kg以上あるグライダーを担いで斜面を走り
安定した姿勢でグライダーを離陸速度に到達させるには、
しっかりと機体を持つ事が大切です。
持ち方が出来ていないと、走行中やテイクオフ直後のコントロールが安定しません。
退屈かもしれませんが機体の持ち方の練習はしっかりと。
グライダー操作の支点と力点、それらの斜面走行中の変化を明確にすると
力強いテイクオフが出来ます。
戻る
b.始めてのテイクオフ
始めてテイクオフする時の注意点は
「今までやっていたグランドハンドリング練習の延長線上にテイクオフがある」
と言う認識でテイクオフのスタートをきる事です。
”グラハンの調子で走っているうちに徐々に体が吊り上げられテイクオフしてしまった”
このような感覚で「始めてのテイクオフ」を経験すべきです。
その為には講習バーンの形状が重要。
スタート地点の斜度は練習機の滑空比よりやや緩く、
離陸地点の斜度は練習機の滑空比よりやや急で、
直線飛行地点の斜度は練習機の滑空比と同じ、
着地点の斜度は練習機の滑空比よりやや緩い。
断面が滑らかなS字を描く場所で「始めてのテイクオフ」を行いましょう。
始めてテイクオフする練習生に加わる垂直Gを講習バーン側で作り出すわけです。
石川県には、北西向きの砂丘が延々と続いています。
無限に存在する講習バーンから、練習生の技量に合った”最適な斜面”を選択して練習を行うことで、
「始めてのテイクオフ」を安全に経験する事が出来ます。
但し、”最適な斜面”は最大斜度(斜面と垂直)方向に走らないとテイクオフできません。
多少の横風でも最大斜度方向にテイクオフ出来るように
斜め横風でのグランドハンドリング練習を行っておきましょう。
戻る
c.テイクオフ

テイクオフは4つのステップから構成されます。
| ステップ1 | 機体を持つ |
| ステップ2 | 平均台上の3歩 |
| ステップ3 | 全開加速の4歩 |
| ステップ4 | 空中へ |

| ステップ | ピッチコントロールの 支点/力点 |
解 説 | ||
| (ステップ1) 機体を持つ |
 支点:肩 力点:指の間 |
1.コントロールバー内でかがみこみ胸、背筋を伸ばして前方を見ながらゆっくりたちあがる。 2.肩がアップライトに後頭部がコントロールバージョイント部に当たる。 3.腕をアップライトに沿わせヒジから手首にかけてアップライトを包み込み人差し指と中指の間でアップライトをクランプして肩を水平基準としてゆっくりたち上がる。 4.再度、胸を張る。肩がアップライトを押し付け機体の水平固定が完了。 |
||
 支点:肩 力点:指の間 |
風の影響で、右片翼が持ち上げられたときはノーズを右へ左片翼が持ち上げられたときはノーズを左へ向けると機体が風に正対し、水平のバランスがとれる。 | |||
| (ステップ2) 平均台上の 3歩 |
 支点:肩 力点:指の間 |
機体に全く浮力の無い状態 機体の水平を保ちながら,真っ直ぐ,ゆっくり歩いて機体に初速をつける。 このステップでバランスを崩したときは即座にテイクオフを中止しましょう。 |
||
| (ステップ3) 全開加速の 4歩 |
 支点:ヒジ 力点:指の間 |
前傾姿勢を強めながら機体を加速。 機体に浮力が発生し肩から機体が外れる。 支点をヒジ内側に切り替え前腕で機体を保持してさらに加速。 このステップでテイクオフを中止することはほぼ不可能です。
|
||
| (ステップ4) 空中へ |
 支点:スイングライン 力点:グリップ位置 |
前傾姿勢・機体浮力が強まりスイングラインが張ってウエイトシフトが効き出す。 |
||
 支点:スイングライン 力点:グリップ位置 |
離陸直後、アップライト操作からベースバー操作に切替えて軽く加速。 ロールコントロールが効き始める。 |

以上の1〜4のステップを6〜8mの安定した海風の吹く砂浜(平地)で止まった状態で練習します。
ホバリングしちゃったりして楽しいですよ。
戻る
d.直線飛行
安定した海風が吹く海岸では直線飛行が上手く出来たのに、
山風の稲葉山ではまっすぐ飛べない。
直線飛行って以外と難しいですね。
稲葉山ではコース上の風の変化に対応しないと真っ直ぐ飛べません。
目線を大切に。
目標地点をしっかり見定めて目標地点と風景の停止点が一致するように操作しましょう。
コントロールバーから伝わる風の変化を感じ取りましょう。
機体に乗せられるのではなくパイロットの意識が機体に先行した時、
機体は真っ直ぐに飛び始めます。
戻る
e.ベースバーでの操作
アップライトでのコントロールに比べ、ベースバーでコントロールするようになると、ピッチコントロールがおどろくほど軽く感じます。
こぶし一つの引き込みで飛行速度がグンと変化します。
微妙なピッチコントロールと重いロールコントロールを上手く行うには、ベースバーの握り方が大切です。
ベースバーを小指と薬指の間にクランプさせてかるく握り、手首を下げる。
これで、手や腕の力を抜いた状態で、ベースバーをしっくりと保持出来るようになります。
戻る
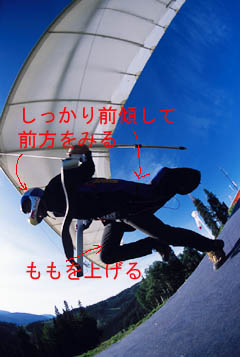
f.着地の準備
プローン姿勢(水平姿勢)で飛行すると
足・下半身に対する意識が低下して、足としての機能が眠った状態になっています。
着地が迫ってきたら、はやめに体を起し、
足をしっかりと真下に下ろし、足を軽く前後に開き、走る姿勢を作ります。
走る姿勢を作る事で眠っていた足をおこしてあげましょう。
戻る
a.始めての旋回
旋回は進路を変更する為に使います。
直線飛行から旋回動作に入る前に、
新たな目標物とライン取りを定めましょう。
目標物の定まっていない旋回操作は単なる蛇行。
新たな目標物が停止点となるように機体を操作しましょう。
戻る
b.始めての90°旋回
(直線飛行)
目線は直進方向の目標物。
↓
(加速操作)
こぶし一つ程度引き込む。
↓
(加速確認)
対気速度の上昇を確認する。
↓
(目標物変更)
90°横の目標物を決定する。同時に体重を旋回方向に移動する。
頭と腕はベースバー中央に保持し腰・足を旋回方向へ移動する。
↓
(0〜45°旋回操作)
バンク角が徐々に大きくなり旋回角速度も徐々に速くなる。
対気速度が落ちないようピッチ操作する。
目線を目標物から離さない事。
↓
(45〜90°旋回操作)
体重を旋回と逆方向に移動し、バンク角を徐々に落として行く。旋回角速度も徐々に低下する。
目線を目標物から離さない事。
↓
(直線飛行に復帰)
速度が若干高まっているので
ゆっくりとニュートラル速度へ復帰する
ポイントは
・目標物をしっかりと定める事。
・旋回中に対気速度が低下しない事。
・バンクの戻しに時間が掛かることに注意する事。
・いつもよりロール操作の効きが悪い自体に遭遇した時は、
落ち着いて対気速度を増して操作性を回復させる。
(この操作は初心者安全策としてターン中のプッシュアウト操作を省略してあります)
戻る
c.180°以上の旋回
コーディネートターン
(直線飛行)
目線は直進方向の目標物。
旋回開始前に周囲の安全確認
↓
(加速操作)
こぶし一つ程度引き込む。
↓
(加速確認)
対気速度の上昇を確認する。
↓
(旋回方向確認)
旋回方向へ目線を切り替える。同時に体重を旋回方向に移動する。
頭と腕はベースバー中央に保持し腰・足を旋回方向へ移動する。
↓
(0〜45°旋回操作)
バンク角が徐々に大きくなり旋回角速度も徐々に速くなる。
対気速度が落ちないようピッチ操作する。
↓
(45°〜旋回操作)
体重をセンターに戻し、バンク角を一定に保つ。
(体重を移動したままでいるとバンクはどんどん深くなります)
引き気味であったベースバーを戻してニュートラル→軽くプッシュ。
ベースバーをプッシュする事でノーズアップが強まる。
機体にバンクが付いた状態でノーズアップ力は旋回力となる。
旋回のGを感じながら、体はベースバー中心、軽くプッシュアウトした状態で旋回動作が続く
・
・
・
[旋回中のプッシュアウトが弱いとどうなるか]
旋回力が弱いのでバンクがついた状態でしばらく真っ直ぐ飛ぶ。
バンクがついた状態で沈下が続く結果、
ハング風見効果により内翼の効力がアップ。その結果 旋回が始まる。
しかしコーディネートされたターンに比べ
旋回中の高度ロスが大きく軌跡・速度もいびつとなる。
[旋回中のプッシュアウトが強いとどうなるか]
旋回内翼の失速による旋回(スピン)に入る。
戻る
d.セーフティランディング

セーフティランディングする為に大切な事は、
着地の瞬間の沈下率をゼロとする事です。
沈下を続けている状態で着地した場合、
着地と同時に急激に機体の荷重が体に加わり
堪えきれずにボディランするかベースバーを落として機体にダメージを与えます。
ファイナルターン後、両足を真っ直ぐ下げて体全体をしっかり起し走行姿勢をとった後、
アップライトを引き込んで加速し滑空ラインを下方に修正、
地上高 2m程を同高度で飛び続けます。
こうして沈下率ゼロの状態を作り出します。
地上高 2m程を維持する為には徐々にノーズアップ操作が必要となり
結果的に前進スピードが低下します。
機体の失速が始まりノーズが重くなる
タイミングでフレアーをかけて機体の下を駆抜けましょう。
獅子吼のランディングを南側から進入する場合、
軽い登り斜面へのランディングとなります。
このような登り斜面で
地上高1m程を同高度で飛びつづけ セーフティに着地する為には、
ファイナルターン後、より強い加速操作が必要になります。

図 Bd.1 正しいランディングアプローチライン
戻る
e.着地点の判断
着地点の判断は景色が止まって見える停止点で行います。
ターゲットが沈み込んで見えるときは高度が高いため通りすぎる事を示しています。
ターゲットが浮き上がって見える時は高度が低いため届かない事を示しています。
つねにターゲットと停止点との関係を元に着地する練習をしましょう。
停止点を探さなくても、
あの木の高さからここを通ってランディングと言った具合に着地もできますが、
このような過去の経験を元にしたアプローチが体に染み付いてしまうと
他のエリアでのフライト、気象状況の変化に対応できません。
つねにターゲットと自分との関係を元に着地する練習を積めば、
突然、獅子吼で難しいと言われる南風が吹いても、
他のエリアに行っても、
アウトサイドランディングの場面に遭遇しても、
いつもと同じ感覚で着地出来ます。
戻る
[ C級 ]
a.最良滑空比
最良滑空比でフライトする為にはどれくらいのスピードで飛べば良いのでしょうか。
一番手っ取り早いのは、GPSとGPS連動バリオを装着し、
バリオに表示される滑空比が最大となるようにコントロールする方法です。
計器が無い場合は、大まかに判断するしかありません。
無風の空域では、ニュートラルよりちょっと高めのスピード
向い風・下降気流の中ではかなり高めスピードです。
下記の性能表を参考にしましょう。
往年の名機DACKの性能表
(性能は現在の初級機と中級機の中間)
RCSの性能表
戻る
[P証]
a.サイドアプローチ
サイドアプローチは、獅子吼の標準的なランディングアプローチ方法として取り入られています。
このアプローチ方法の特長は、
a.ランディング付近まで障害物が迫っていて風下空域が狭い場所でも適応できる。
b.低空での旋回切り返し操作が不要。
c.ランディング風下空域の混雑/交錯が低減ができる。
d.吹流しが無くても着地点の風向判断が出来る。
等です。
まず、
ランディング場付近の高度処理エリアで360°旋回で高度処理を行います。
この時、他機とのアプローチタイミングの調節を行います。
適当な高度に達したら風下のファイナルアプローチポイントに向けて大きく場周飛行を開始します。
場周飛行中にゆっくり旋回半径を狭めながらターゲットの動きを観察します。
着地点の判断手法により
浮き上がりが見られた場合、小回りで
沈み込みが見られた場合、大回りで
場周飛行旋回半径を調節しながら、ファイナルアプローチポイントに入ります。
もしも、場周飛行が他機とかさなった場合は、
他機との間隔を保って、一列で進入を継続します。
今まで”8の字旋回”でのアプローチしか経験が無く、この方法に慣れていない場合は、
ファイナルアプローチポイントをターゲットから高く・遠い点において
ファイナル後の距離・高度に十分な余裕をとりましょう。
 |
(クリックで拡大)
戻る
a.ポーラカーブ式の活用
フライトコンピュータ搭載バリオを使用すると、自分の機体のポーラカーブ式(対気速度に対する沈下率)を得ることが出来ます。
クロスカントリーに出る前にこの式を使ってコンピュータ上でクロスカントリーのシミュレーションを行いましょう。
下記の式はグッケンモス社RCSの特性式で獅子吼でフライトしながら蓄積されたデータを
バリオ付属のコンピュータソフトで吸い上げる事により求められた物です。
この式を使い獅子吼から富山医王山間をノンサーマルでクリアする条件を求めた所、
西4mで獅子吼スタート高度を海抜1800m、対気速度を約44km/hとすればクリア出来る事が判ります。
理論的な確信をもって未知のエリアへチャレンジする。これもハングの醍醐味のひとつでしょう。
最近では獅子吼スタート高度を海抜1600mまで落として成功しています。
日常的に獅子吼と富山のエリアを行き来する時代が来るかも知れませんね。
ポーラカーブ式の取得方法と活用方法については当校クロスカントリーコースで詳しく説明致しますので是非御入校下さい。
[RCSポーラ式]
wd:コース上の正対風成分
t:0〜1.0
前進速度 =
9.431*(1-t)*(1-t)
+16.121*2*t*(1-t)
+19.919*t*t
- wd;
沈下速度 =
-1.073*(1-t)*(1-t)
-0.977*2*t*(1-t)
-3.249*t*t;
滑空比 = -前進速度/沈下速度;
[ポーラカーブ]
 |
戻る
